














 54 / 84
54 / 84

54
SAMC
o
T
• ANNUAL REPORT 2015
Dynamic positioning in drifting sea-ice
PhD candidate Øivind Kjerstad started his work as
researcher in SAMCoT in 2015. Located in Svalbard,
Kjerstad studies technology for marine operations in drift-
ing sea-ice. Not only is his research exciting, it also allows
SAMCoT to pursue the next generation of dynamic position-
ing (DP) motion control systems. WP5’s objective is to keep
the development as general as possible so that the results
apply not only to the limited number of operations in polar
environments, but also the vast fleet of DP vessels around
the world.
In a long-term perspective, following the trend in other
autonomous applications such as self-driving cars, planes,
and drones, the marine vessels should gain the ability to
autonomously observe, predict, plan, and act on their
surrounding environment more independently. This will
complement the operator so that both computers and
humans can do what they do best. In a short-term perspec-
tive, Kjerstad`s research is focused on improving precision
and reactivity of the DP control system and automating
some of the required surveillance tasks on ice manage-
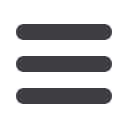
ment. Currently Kjerstad is working with sensor technol-
ogy to measure the global load on the ship and apply these
signals in monitoring- and closed-loop control systems.
The control designs are also extended by new advances
in control theory. In order to plan and act according to
the environment we are incorporating radar and camera
technology, as part of the online ice observation system.
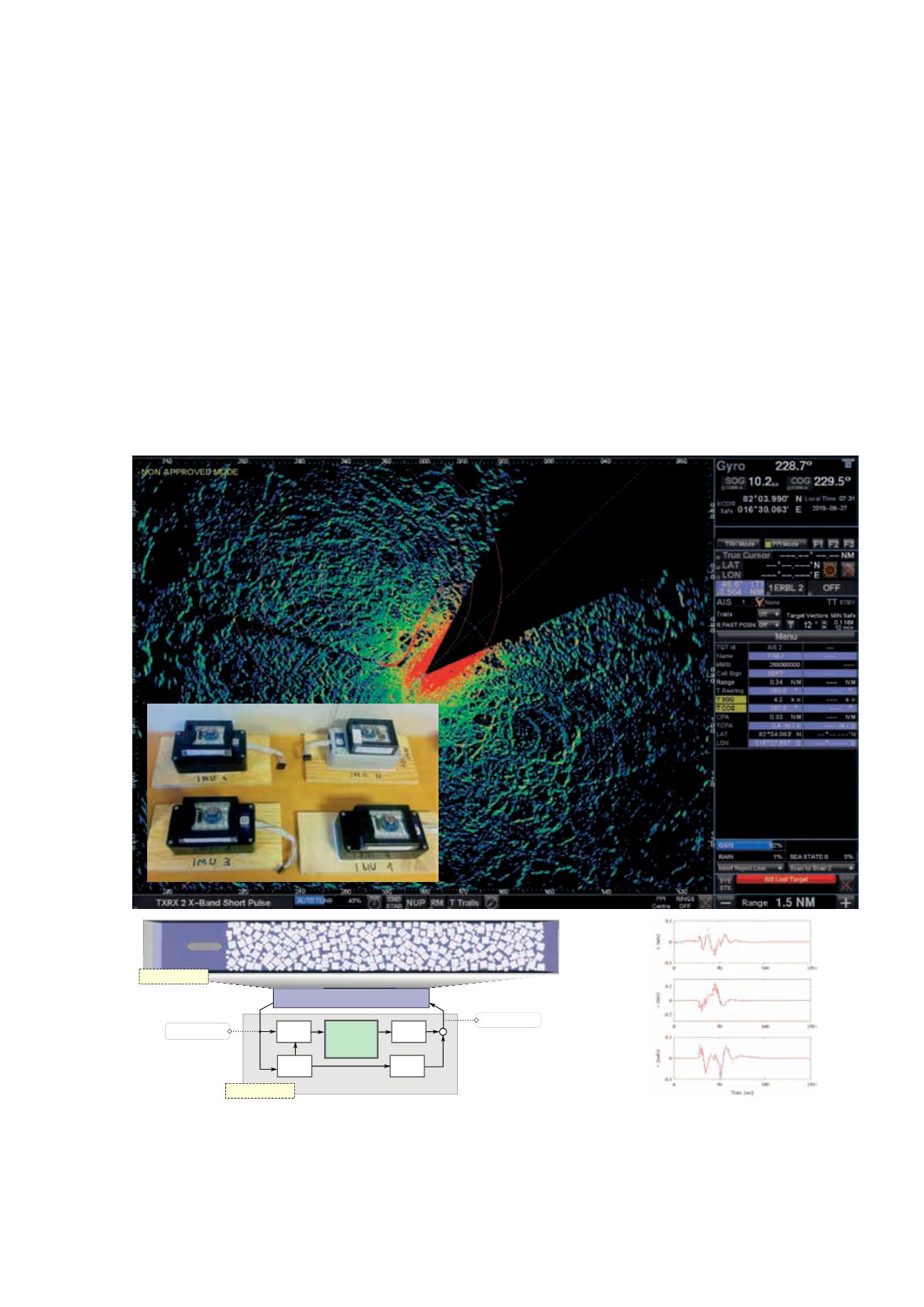
Figure WP5_13 For the next generation DP control systems inertial sensors, radar technology, high fidelity numerical simulations,
and hybrid designs are all integral parts.
Sensor
models
Actuation
models
Ice drift
generator
Control
system
Additional
physics
CONTROL APPLICATION
NUMERICAL ICE TANK
NIT configuration file
CA configuration file
Position, orientation,
velocity, and angluar rates
Superpositioned loads
acting on the vessel CO