














 54 / 80
54 / 80

52
Annual Report 2016
SAMCoT
In April 2016 SAMCoT PhD candidate Petter Norgren
participated in an experiment to explore the possibility
of combining R/V Gunnerus, the autonomous underwater
vehicle (AUV) Hugin, the unmanned aerial vehicle (UAV)
X8, and the unmanned surface vehicle (USV) Mariner
in a network of heterogeneous unmanned vehicles.
Different institutions participated, among them NTNU,
the Norwegian Defence Research Establishment
(Forsvarets forskningsinstitutt, FFI), Kongsberg Seatex,
the Laboratório de Sistemas e Tecnologia Subaquática
(LSTS) at the University of Porto and Maritime Robotics.
Communication, maneuvering, onboard processing,
and operational complexity are essential components
in such networks. The Kongsberg marine broadband
radio (MBR) system was used for communication.
Norgren was involved with the AUV operation and on the
processing of the data collected.
The participants defined a scenario with seabed
mapping and target recognition to show the capabilities
of the proposed system. The experiment made it
apparent that these networks have the potential to save
significant data collection costs in marine research
and management by reducing ship time. To unlock fully
INTEGRATED AUTONOMOUS OPERATIONS
the potential of networks of heterogeneous unmanned
vehicles, the objectives of each individual vehicle will
need to be better integrated into the overall mission.
Autonomous Tethering of AUVs
using the USV Jetyak
A standard AUV survey requiring high-accuracy navi-
gation currently requires a ship to follow the AUV and
provide position updates. Moving this task to an USV,
that autonomously follows the AUV, could potentially
save significant ship time. Autonomous tethering of
AUVs using a USV can also provide a real-time commu-
nication link between an operator station and an AUV,
which is often a desired feature for monitoring progress
and status. To prepare for research on autonomous
tethering, the NTNU/UiT USV Jetyak was equipped with a
range of new sensors.
Norgren extended the hardware of the USV Jetyak
control system to allow logging and control of the
new sensors through a Kongsberg MBR 144. The main
goal of the new hardware interface on the Jetyak was
to allow acoustic communication, as well as Wi-fi
connectivity, with the Light AUVs (LAUVs) through the
AUV expedition with students from the
UNIS course AT334 in Longyearbyen, August 2016
MBR. The upgrade of the Jetyak control system also
allowed inclusion of several new sensors, and to extend
the feasible operating area for the Jetyak in the Arctic
polar night, Norgren also equipped the Jetyak with
a SIMRAD 4G radar and an infrared IP camera. The
scientific payload of the Jetyak was also extended to
include a Norbit multibeam sonar, in addition to the old
payload consisting of sidescan sonar and an acoustic
zooplankton and fish profiler (AZFP).
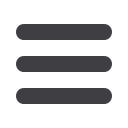
Example track of the Icebreaker Oden through various ice regimes, reconstructed from the camera images,
and the corresponding extreme load distribution fit for a part of the track.
To facilitate Heyn’s research, four inertial measurement
units (IMUs) were mounted on different locations in
the vessel to monitor the ice-induced accelerations
of the icebreaker hull during both station-keeping
operations and transit through the sea-ice. The IMU
motion data were also supported by a system of 11
cameras that continuously monitored the ice conditions
and icebreaking processes 360 degrees around, and
especially ahead of the vessel. The conjecture here is
that the acceleration measurement of the IMUs will
contain information on the ice loads acting on the ship’s
hull similar to that which could be obtained from strain
gauges. SAMCoT’s research attempts to use the IMUs,
cameras and radar data for the online tracking and
short-term prediction of the extreme ice loads acting
on the vessel, estimation of local ice drift velocity and
direction relative to the vessel and real-time estimation
of global ice loads on the vessel. In addition to functi-
oning as an important image documentation system for
validation purposes, the camera images are further used
to estimate the local ice concentration and floe size
distribution and possibly to identify ice features such as
ridges and melt ponds.