














 52 / 80
52 / 80

50
Annual Report 2016
SAMCoT
12:00
15:00
18:00
21:00
00:00
03:00
06:00
09:00
12:00
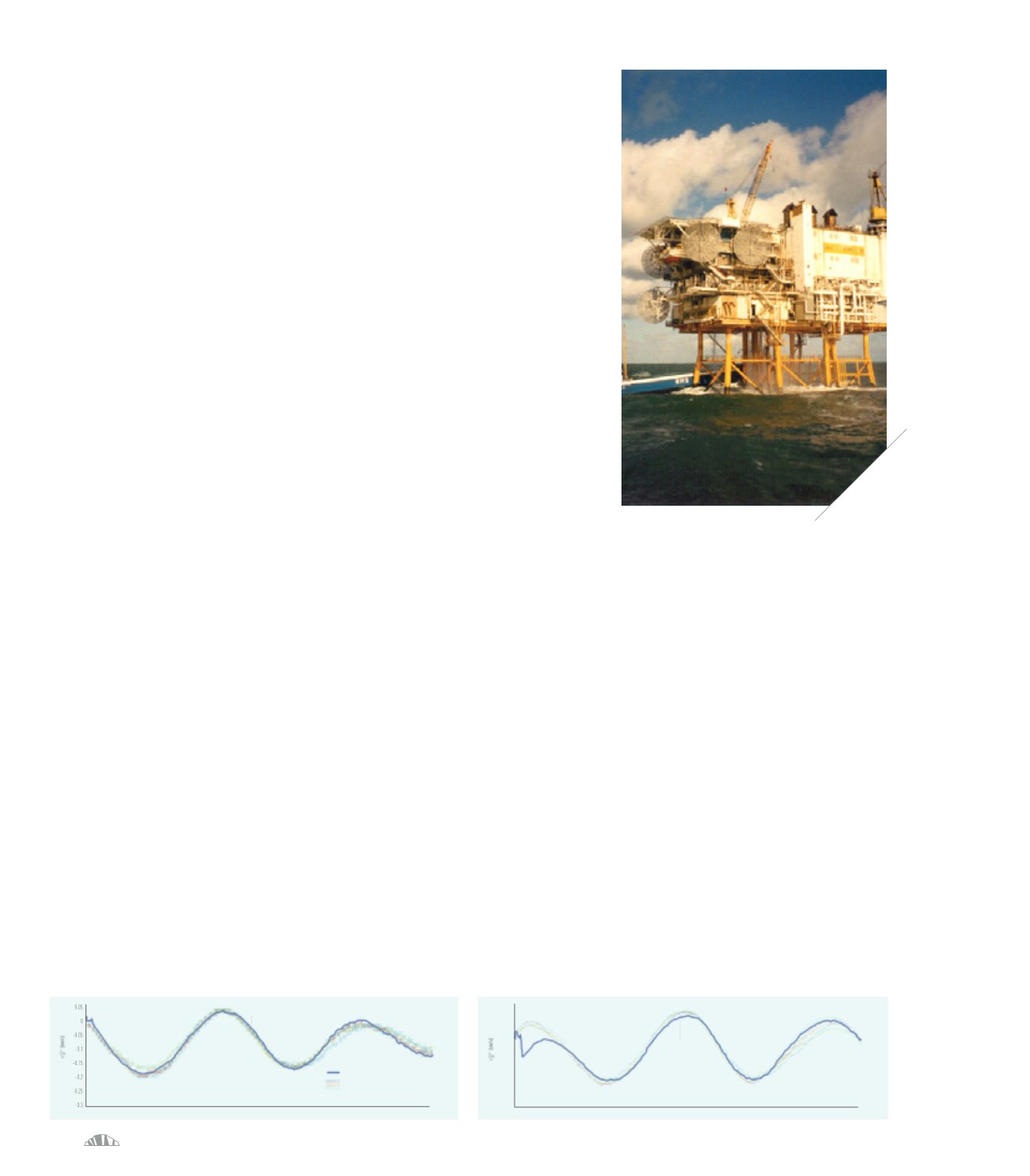
Ice drift velocity estimate
Differentiated beacon positions
0.1
0
-0.1
-0.2
12:00
15:00
18:00
21:00
00:00
03:00
06:00
09:00
12:00
12:00
15:00
18:00
21:00
00:00
03:00
06:00
09:00
12:00
Ice drift velocity estimate
Differentiated beacon positions
0.1
0
As a rule, the captain of a ship involved in a station
keeping operation in the Arctic has a support advisory
group at his or her assistance. This group, a so-called
”ice management team”, can consist of meteorologists,
ice experts, and others with knowledge about ice or who
have experience with similar operations. In many cases it
is an entire fleet of ships that has to cooperate to achieve
the operation objective. In such situations it is highly
important that all ships have the necessary information
about the weather, ice conditions and potential hazards
in the area.
Postdoc Øivind K. Kjerstad does his research on one of the
key challenges of IM: monitoring of ice. Kjerstad defended
his PhD with the topic “Dynamic Positioning of Marine
Vessels in Ice” on May 3 2016 at the NTNU. Ice motion is
difficult to measure and predict accurately, making risk
ICE MANAGEMENT ONBOARD DECISION SUPPORT SYSTEMS
management challenging. To date no reliable and robust
systems exist to provide real-time information on ice
movement or the loads induced on the ship. The captain
must therefore rely on their own or others’ experience
to operate vessels in ice-covered waters. At present, a
set of position sensors physically placed on the ice by
helicopter is used to monitor ice. The position sensors
must be collected when they run out of the operation
area for environmental reasons, making this method quite
demanding in terms of logistics and costs. In bad weather,
when the need to know how ice moves is highest, helicop-
ter use also entails the greatest risk or is not possible at
all. Kjerstad and other researchers in the IM team focus
on developing other monitoring systems that provide
the necessary information using only on-board sensors.
Kjerstad is investigating a load monitoring system.
It consists of a set of inertial measurement sensors to
record the accelerations and rotational rates of the ship.
Fusing these signals with conventional on-board sensors,
including mooring tension sensors if available, allows
the global load acting on the vessel to be estimated in
real-time. In addition, this system monitors the incoming
direction of the loads and rapidly detects changes in the
load direction. This is important for risk monitoring and
consequence analysis, and improves station-keeping
capabilities as it achieves better accuracy in the load
compensation calculated by the station-keeping control
system.
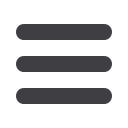
The Norwegian Petroleum Safety Authority (PSA)
requires offshore petroleum operators on the Norwegian
Continental Shelf (NCS) to perform risk assessments of
impacts (allisions) between passing ships and offshore
installations. These risk assessments provide a basis for
defining the design of the allision accidental load on the
installation. Even though the risk of allision is small,
the potential consequences can be catastrophic. In a
worst-case scenario, an allision may result in the total
loss of an installation. The ageing industry standard
allision risk model, COLLIDE, calculates the risk of
impacts between passing (non-field-related) ships and
installations based on Automatic Identification System
(AIS) data. Both the COLLIDE risk model and a new Bay-
esian allision risk model currently under development
are highly sensitive to variations in the vessels’ passing
distances, especially close proximity passings.
Allision risk assessments are typically performed during
the design and development phase of an installation,
which means that historical AIS data are used ”as is”,
disregarding future changes to the traffic pattern when
the new installation is placed at a location.
A NEW RISK MODEL BASED ON A BAYESIAN NETWORK
PhD candidate Martin Hassel presents, in one of his
publications, an empirical study of one of the most
important variables used to calculate the risk of allision
from passing vessels, namely passing distance. The
study shows that merchant vessels alter course to
achieve a safe passing distance from new surface
offshore petroleum installations. This indicates that the
results of current allision risk assessments are overly
conservative.
Hassel also proposes a new risk model based on a
Bayesian Network that can replace the old COLLIDE
model. Hassel reviewed the background knowledge and
presented the theoretical foundation of existing risk
models used on the NCS as the basis for his new model.
The new risk model incorporates a wider range of risk
influencing factors (RIFs) and enables a holistic and
detailed analysis of risk factors and dependencies. It is
more transparent and provides a better understanding
of the mechanisms behind allision risk calculations. An
expert panel has quantified key RIFs in the model, and
the results from the new model are aligned with indus-
try expectations, indicating a satisfactory performance.
Photo of the MS Reint – H7 allision,
taken by the crew on the nearby standby vessel.
A result from the ice velocity estimation algorithm using
radar and ship motion sensors compared to the ice velocity
recorded by sensors placed on the ice cover.