| Tema som gås gjennom, evt link | Eventuell ekstra informasjon |
|---|
| UR vs TM i RoboDK | 180 grader forskjell på basen |
| Hvordan lage objekter i Shapes |
|
| Mappestruktur |
|
| Reference frame | Posisjon til objekt i forhold til robot base eller omgivelsene. Kan bygges opp et tre av parent-child relasjoner. |
| Hvordan legge til griper | Drag and drop |
| Targets | Når en oppretter "targets" lagrer en TCP (Tool Center Point) sin posisjon i tillegg til robot-aksene, med hensyn til reference frame i det kartesiske området. Som en standard blir targets lagret som kartesiske targets Image Added. Når en da flytter på en referance frame vil roboten prøve å nå posisjonen til targets med hensyn til den rammen. Image Added. Når en da flytter på en referance frame vil roboten prøve å nå posisjonen til targets med hensyn til den rammen. Det går også an å lagre targets i ledd-området, altså joint values  Image Added. Da er target en absolutt robotposisjon og vil ikke bli endret om rammen er flyttet på seg. Image Added. Da er target en absolutt robotposisjon og vil ikke bli endret om rammen er flyttet på seg. |
| Program |
|
| Linear, joint & circular move | Ulike typer bevegelser du velger at roboten bruker i et program. Det er vanlig at den første bevegelsen i et program er en joint move. |
| Kollisjonssjekk | Velg Tools➔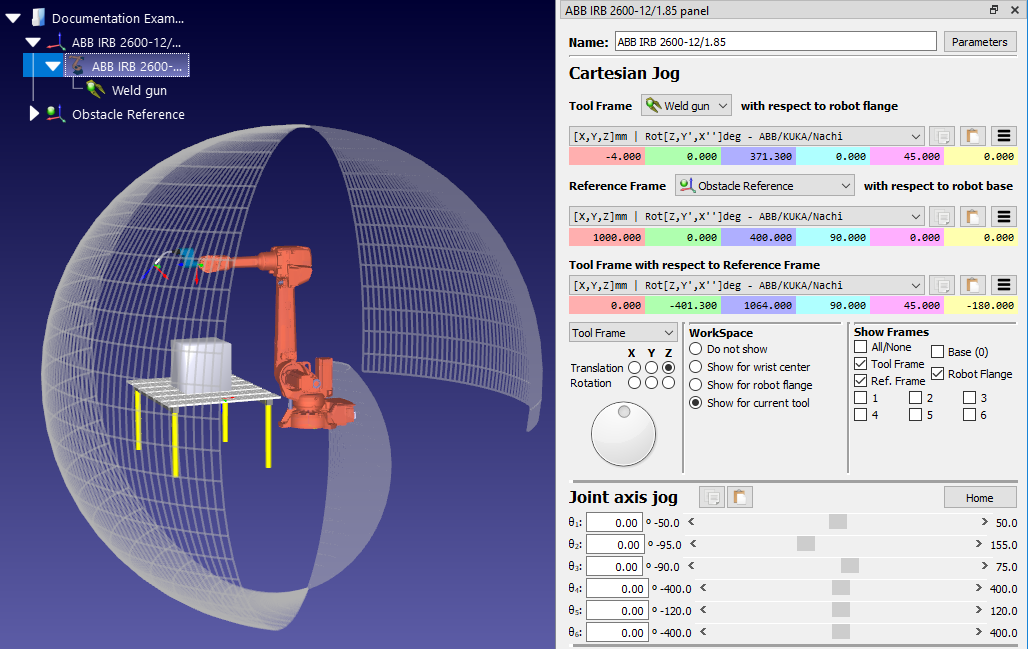 Image Added Check collisions for å skru kollisjonsdeteksjon på eller av. Om deteksjon er aktivert vil alle program og robotbevegelser stoppe ved en kollisjon. Alt som er koblet sammen til en kollisjonstilstand vil bli rødfarget under simuleringen. Image Added Check collisions for å skru kollisjonsdeteksjon på eller av. Om deteksjon er aktivert vil alle program og robotbevegelser stoppe ved en kollisjon. Alt som er koblet sammen til en kollisjonstilstand vil bli rødfarget under simuleringen. |
| Post Processor | Post Processors genererer robotprogram for en spesifikk robotkontroller. Det er ved hjelp av denne at en kan unngå direkte programmering i RoboDK. |
| Simulering og fart | Som standard simulerer RoboDK fem ganger raskere i programmet enn på roboten. Det vil si at hvis et program utføres på 30 sekund vil programmet bli simulert i seks sekund. En kan skru opp hastigheten på simuleringen opp til en ratio til 100. En kan endre farten i Tools➔Options➔Motion menu. |
Viktig å tenke på før en begynner |
|
|---|
| Replace Objects | - Når en begynner å lage program, lag en callback på objektene som er i bruk!!!
- Lag et program, kall det «Replace Objects»
- Add event
- Action – Set object position (relative)
- Marker det du vil ha muligheten til å tilbakestille, trykk ok
- Nullstiller alt til begynnelsen
|
| Banelinje | - Viktig å lage «delposisjoner». En må skjønne banene til robotarmen og eventuell kollisjonskurs.
- Mange roboter stopper ikke ved kollisjon. Dette kan skape store kostnader og tidsforsinkelser i produksjonen.
|
| Diverse nyttige linker |
|---|
Hva | URLhttps://robodk.com/downloadGetting Started - Documentation | Getting Started Guide - Youtube Spilleliste | https://robodk.com/library | https://robodk.com/forum/ | EkstraOm Post Processors