
Det mest prestisjefylte en forsker kan få
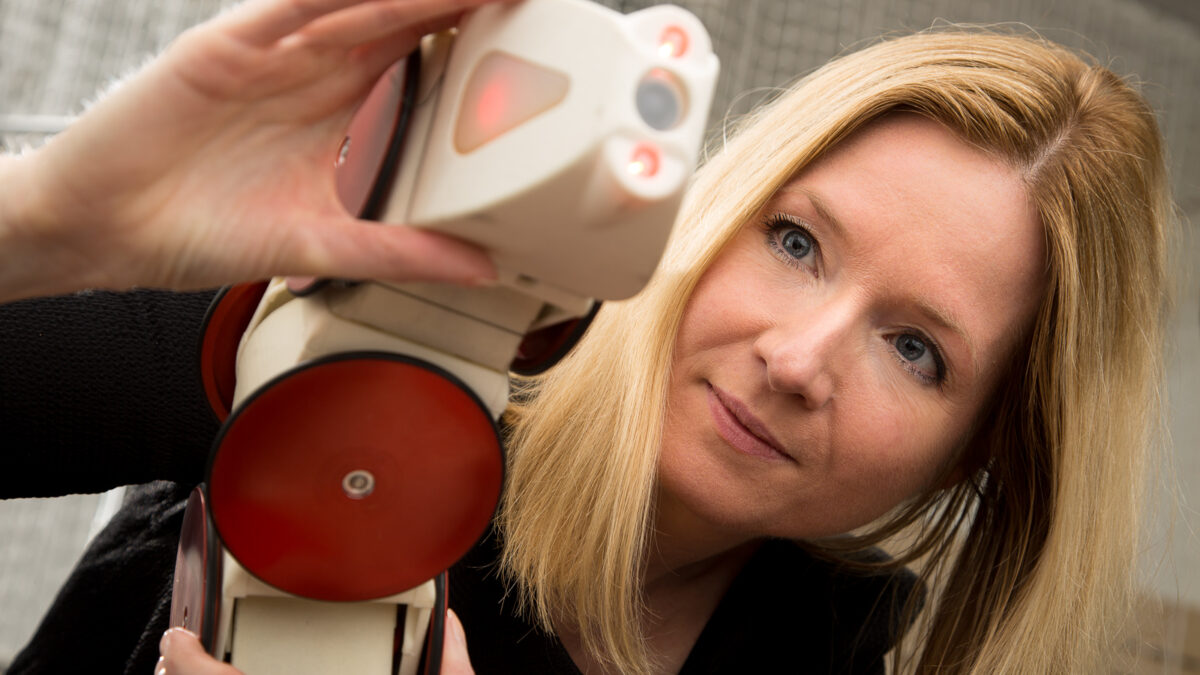
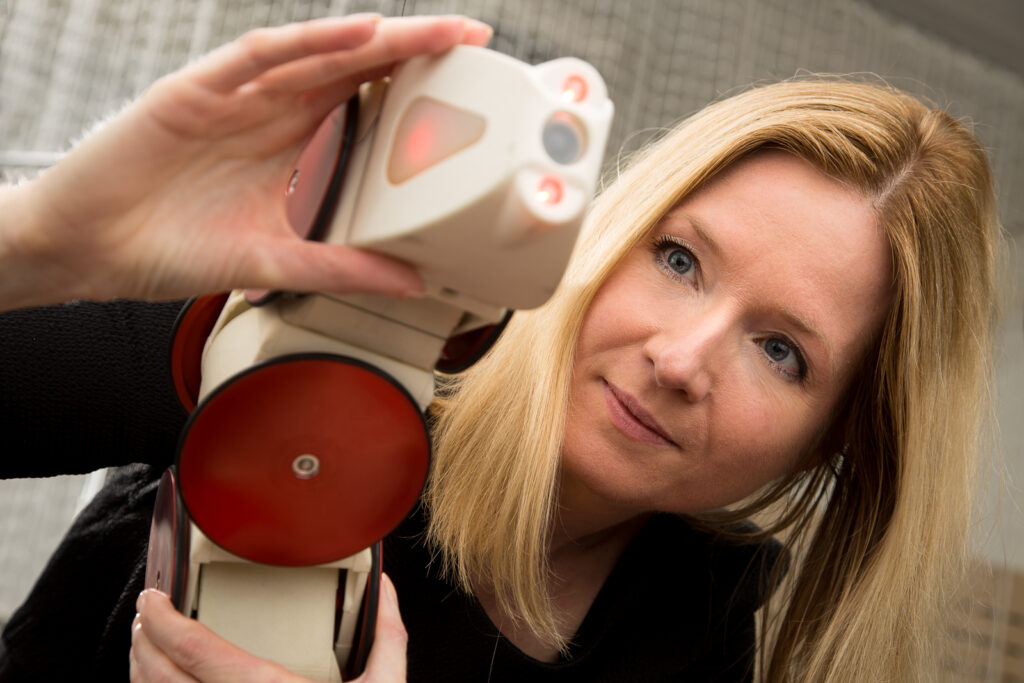
Kristin Y. Pettersen får ERC Advanced Grant-stipend på første forsøk. Det får hun for sine banebrytende idéer for lette, fleksible roboter. Det mangler ikke på lovord når folk skal beskrive Kristin Y. Pettersen og forskningen hennes.
Dette er nesten som å få Nobelprisen
Morten Beivik, instituttleder teknisk kybernetikk
En fantastisk anerkjennelse til både Kristin og fagmiljøene
Ingrid Schjølberg, dekan fakultetet for informasjonsteknologi og elektroteknikk
2,5 millioner Euro
Det Europeiske Forskningsrådet (ERC) har som mål å fremme høykvalitetsforskning gjennom å investere i de beste forskerne og de beste idéene. Pettersen har fått 2,5 millioner Euro for sitt prosjekt CRÈME – Control of light vehicle-manipulator systems. Det betyr mulighet for å ansette fire doktorgradsstipendiater og to post.docs som i fem år framover skal jobbe i prosjektet sammen med Pettersen selv.
– Du har nå fått det mest prestisjefylte forskningsstipendet en forsker skal få og det på første forsøk. Hvordan er det?
– Det er fantastisk. Jeg har jobbet veldig hardt med å utvikle dette prosjektet. At det gikk gjennom på første forsøk, det er stort og litt uventet, sier Pettersen. Professoren i kybernetikk og robotikk er et eneste stort smil etter at nyheten ble kjent.
Et tverrfaglig panel og 11 internasjonale eksperter har vurdert søknaden. Panelet skriver «The panel was convinced of the strong element of innovation in the proposed control methods and technologies for the manipulators with light moving base».
Nysgjerrighetsdrevet forskning
– Et ERC Grant-stipend gis til nysgjerrige forskere. Risikovilje, nye måter å tenke på, jobbe på, søke svar på er viktig. Det er forskeren selv og forskerens idéer som det blir lagt vekt på. «High risk, high gain», sier Pettersen og fortsetter på norsk: Dette er ikke enkelt. Dette er ikke noe du umiddelbart vet hvordan du får til. Du får lov til å satse høyt og får gjøre noe som er kjempeutfordrende forskningsmessig. Noe du er skikkelig nysgjerrig på og har lyst til å finne ut av!
Roboter med armer
Målet er å utvikle mobile roboter som er i stand til å løse mange ulike oppgaver og som er autonome og lette. Det siste er viktig for at de både skal være trygge for mennesker og billige. Disse robotene skal ikke bare være i stand til å observere verden rundt seg, men også å samhandle med omgivelsene ved hjelp av én eller flere manipulatorarmer. Mens en robotgressklipper kan gjøre én enkelt oppgave, skal disse robotene kunne bevege seg fritt rundt omkring i verden og utføre mange ulike jobber. Dette er roboter som kan fly ut, finne feil, og drive vedlikehold på vindmøller langt til havs. Eller de rykker ut fra en stasjon på havbunnen for å drive vedlikehold på havbruksmerder eller oljeinstallasjoner. De løser oppgaver til lands og til vanns og i lufta med, for å si det som Askeladden.
Noe av nøkkelen til suksess, og samtidig forskningsutfordringen, ligger i robotenes armer. Hvilke oppgaver de skal løse og hvordan de skal greie det når robotene er lette og uten fast forankring.
Maur og elefanter
Det jeg ønsker å oppnå er ekvivalent med «en flygende maur som skal sjonglere en drue i sterk vind».
Kristin Y Pettersen
For å relatere dette til robotikk, lanserer hun begrepene kinematikk og dynamikk. Bevegelsen til maurens arm representerer kinematikken, og kroppens bevegelse representerer dynamikken i systemet. Utfordringen er at armens bevegelse når den sjonglerer (manipulerer) druen vil påvirke bevegelsen til maurens kropp. Dette krever en enorm koordinering mellom bevegelsen til armen og bevegelsen til kroppen for at mauren ikke skal bli fullstendig ustabil. Denne tette koblingen mellom kinematikk og dynamikk har vi i dag ikke metoder for å ta godt nok hensyn til.
Så langt har man derfor hovedsakelig laget mobile roboter hvor kroppen er veldig stor i forhold til manipulatorarmen. Da skaper ikke denne koblingen så store problemer. For å holde oss til dyreverdenen, er analogien vi kan tenke på her «en elefant som sjonglerer en vannmelon ved hjelp av snabelen sin». Bevegelsen til snabelen vil naturlig nok ikke påvirke bevegelsen til elefantens kropp i særlig grad. Men for at det skal være mulig å lage de lette og trygge mobile robotene som jeg ønsker, er det nødvendig å utvikle et nytt reguleringsteoretisk rammeverk som tar hensyn til og håndterer denne koblingen.
Stor takk til kollegaene
Professor Kristin Y. Pettersen er opptatt av å dele æren med kollegaene sine på Institutt for teknisk kybernetikk og Senter for autonome marine operasjoner og systemer (NTNU AMOS). – Dette ville ikke vært mulig å få til uten den sterke akademiske gruppen og den høye kvaliteten på støtten fra administrativ og teknisk gruppe. Det er en fantastisk arbeidsplass med utrolig dyktige kollegaer som jeg setter stor pris på både faglig og menneskelig, sier hun og peker særlig på Professor Jan Tommy Gravdahl. – Han er en nær og god kollega, som har vært helt sentral i utarbeidelsen av dette prosjektet, sier hun.
Instituttleder Morten Breivik sier alle ved instituttet er stolte og glade på Kristins vegne.
Hun er den første ved instituttet og hun er den første ved fakultetet. Dette vitner om en forsker i verdenstoppen. Vi ser fram til å være vertskap for et slikt prosjekt.
CRÈME-prosjektet er faglig veldig ambisiøst og vi gleder oss til å se resultatene som kommer ut av det, som i god kybernetisk tradisjon forhåpentligvis også vil komme flere bruksområder til gode, sier Breivik.
Morten Breivik, instituttleder teknisk kybernetikk
Oppsummert
– Vi vil utvikle et nytt reguleringsteoretisk rammeverk som gjør det mulig med autonom styring av komplekse robotsystemer som har en sterk kopling mellom kinematikk og dynamikk, sier Pettersen.
Er du av dem som forsto dette og ble inspirert: Det skal ansettes både doktorgradsstipendiater og post.docs i prosjektet.

Kjersti Bruheim
Kjersti Bruheim er rådgiver for dekan ved Fakultet for informasjonsteknologi og elektroteknikk på områder som lederstøtte, samfunnskontakt og kommunikasjon.


{kind=link}
{kind=link}
{kind=link}
{kind=link}